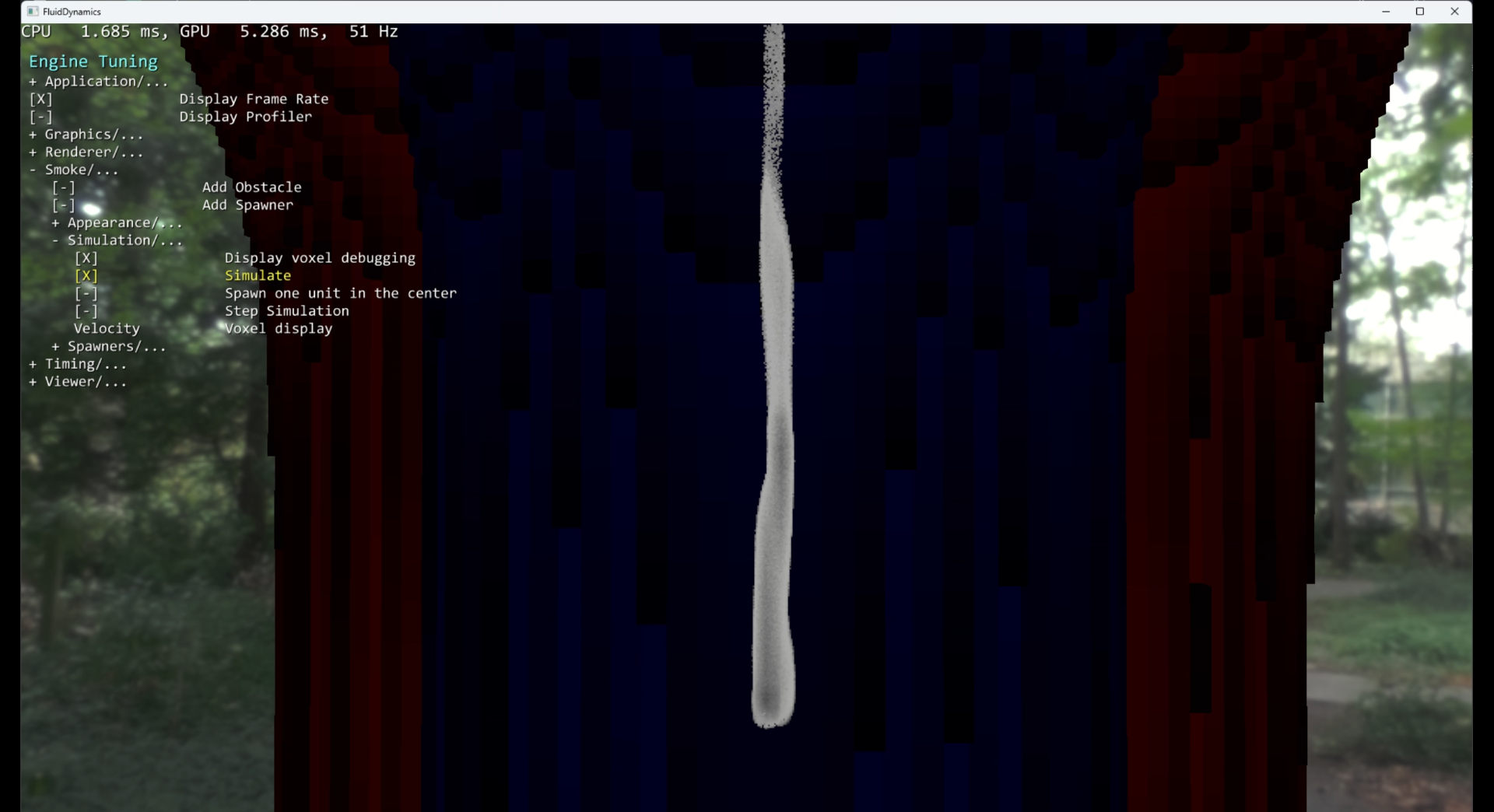
DX12 Smoke simulator
Some simulation through HLSL compute shaders and ray marching

Details
Grade: 6.1
Version: v1.0
Language(s): C++, HLSL
Engine: MiniEngine
See my blog for an in-depth look into thee physics and simulation. This page shows aspects related to the implementation.
Overview
This project was part of the second project of Year 2 at BUas. I was tasked to research a topic of my choosing for which I chose to dive into smoke simulation. Using Microsoft’s MiniEngine I made my own module to simulate smoke in a single bound.
I implemented the entire fluid simulation through the use of compute shaders and 3D textures and implemented a debug view with the use of indirect draw calls.
MAC Solver Compute pipeline
The pipeline works on the following set of buffers:
TypeBuffer(R8_UINT): Holds the type of each cell (EMPTY,FLUIDorSOLID)PressureBuffer(R32_FLOAT): Self-explanatory.VelocityXBuffer(R32_FLOAT): Holds the X velocity of all left edges of the cells.VelocityYBuffer(R32_FLOAT): Holds the Y velocity of all top edges of the cells.VelocityZBuffer(R32_FLOAT): Holds the Z velocity of all back edges of the cells.FluidBuffer(R32_FLOAT): Holds the density of the fluid at all cells.TemperatureBuffer(R32_FLOAT): Self-explanatory.VorticityBuffer(R32_FLOAT): Self-explanatory.TempBuffer[1-3](R32_FLOAT): Hold temporary data (depends on stage).
First, the type buffer is cleared whereafter all compute shaders are ran in the order described below.
Spawner
The spawner shader gets run before the simulation and inserts temperature and density into the buffers based on spawner parameters set through code or the Engine Tuning menu.
Obstacle
First, all obstacles are loaded into a StructuredBuffer from which all cells inside that obstacle are set to SOLID.
Type
Afterwards, the type determination shader fills in the type buffer. Solid cells are skipped and cells with > 0.001 density are marked FLUID. This type buffer is then used by some shaders to prune work.
Negative Divergence cache
To speed up the pressure solver, I write the negative divergence of all cells to TempBuffer1, which the pressure solver can use to speed up its calculations.
[numthreads(MAC_GROUP_SIZE, MAC_GROUP_SIZE, MAC_GROUP_SIZE)]
void main(uint3 tId : SV_DispatchThreadID)
{
// snip...
float velocity = 0.f;
velocity += MAC::VelocityXBuffer[tId + uint3(1, 0, 0)];
velocity -= MAC::VelocityXBuffer[tId];
velocity += MAC::VelocityYBuffer[tId + uint3(0, 1, 0)];
velocity -= MAC::VelocityYBuffer[tId];
velocity += MAC::VelocityZBuffer[tId + uint3(0, 0, 1)];
velocity -= MAC::VelocityZBuffer[tId];
MAC::DivergenceBuffer[tId] = -density * deltaX * velocity / deltaTime;
}Pressure solver
The pressure solver then uses the negative divergence to calculate the pressure on each cell. Boundary conditions are also taken into account. I use a method that cancels all pressure differences on an axis if one of the cells is at the border. I found this to be the most stable method.
/*
* Right
*/
uint3 right = center + uint3(1, 0, 0);
if (iAmSolid || MAC::TypeBuffer[right] == SOLID)
{
// Boundary
px = 0.0;
pxBlocked = true;
}
else
px += MAC::PressureBuffer[right];
/*
* Left
*/
uint3 left = center + uint3(-1, 0, 0);
if (iAmSolid || MAC::TypeBuffer[left] == SOLID)
{
// Boundary
px = 0.0;
}
else if (!pxBlocked)
px += MAC::PressureBuffer[left];Vorticity cache
This shader caches the
Velocity solver
This is where all stages come into play. The velocity is determined by the difference in pressure whereafter external forces are applied (buoyancy and vorticity).
float3 GetDensities(uint3 center, uint3 res)
{
// Buoyancy
float Tc = MAC::TemperatureBuffer[center];
float Tx = Tc - SafeLoadTemp(center + int3(-1, 0, 0), res);
float Ty = Tc - SafeLoadTemp(center + int3(0, -1, 0), res);
float Tz = Tc - SafeLoadTemp(center + int3(0, 0, -1), res);
float sc = MAC::FluidBuffer[center];
float sx = sc - SafeLoadFluid(center + int3(-1, 0, 0), res);
float sy = sc - SafeLoadFluid(center + int3(0, -1, 0), res);
float sz = sc - SafeLoadFluid(center + int3(0, 0, -1), res);
return max(float3(
AIR_DENSITY * (1.0 + BUOY_ALPHA * sx - BUOY_BETA * Tx),
AIR_DENSITY * (1.0 + BUOY_ALPHA * sy - BUOY_BETA * Ty),
AIR_DENSITY * (1.0 + BUOY_ALPHA * sz - BUOY_BETA * Tz)
), 0.05 * AIR_DENSITY);
}
void UpdateVelocity(uint3 center, uint3 res)
{
const float3 densities = GetDensities(center, res);
const float3 k = deltaTime.xxx / (densities * deltaX);
const float centerPressure = MAC::PressureBuffer[center];
uint3 left = center + uint3(-1, 0, 0);
if ((center.x == 0 || center.x == res.x) && center.y < res.y && center.z < res.z)
MAC::VelocityXBuffer[center] = 0.0;
else if (MAC::TypeBuffer[left] != SOLID)
MAC::VelocityXBuffer[center] -= k.x * (centerPressure - MAC::PressureBuffer[left]);
// etc. for Y and Z
}
static const float VORTICITY_EPSILON = 0.8;
void ApplyExternalForces(uint3 center, uint3 res)
{
// Buoyancy
float Tc = MAC::TemperatureBuffer[center];
float Ty = 0.5 * (Tc + SafeLoadTemp(center + int3(0, -1, 0), res));
float sc = MAC::FluidBuffer[center];
float sy = 0.5 * (sc + SafeLoadFluid(center + int3(0, -1, 0), res));
static const float G = -9.81;
MAC::VelocityYBuffer[center] += deltaTime * (BUOY_ALPHA * sy - BUOY_BETA * Ty) * G;
// Vorticity
// R. Fedkiw, J. Stam, H.W. Jensen, "Visual simulation of smoke", 2001
// https://dl.acm.org/doi/pdf/10.1145/383259.383260
float3 eta;
eta.x = (SafeLoadVortMag(center + int3(1,0,0), res) - SafeLoadVortMag(center - int3(1,0,0), res)) * 0.5;
eta.y = (SafeLoadVortMag(center + int3(0,1,0), res) - SafeLoadVortMag(center - int3(0,1,0), res)) * 0.5;
eta.z = (SafeLoadVortMag(center + int3(0,0,1), res) - SafeLoadVortMag(center - int3(0,0,1), res)) * 0.5;
float3 N = normalize(eta + 1e-6);
float3 omega = MAC::VorticityBuffer[center].xyz;
float3 force = VORTICITY_EPSILON * cross(N, omega);
MAC::VelocityXBuffer[center] += deltaTime * force.x;
MAC::VelocityYBuffer[center] += deltaTime * force.y;
MAC::VelocityZBuffer[center] += deltaTime * force.z;
}
[RootSignature(MAC_RootSig)]
[numthreads(MAC_GROUP_SIZE, MAC_GROUP_SIZE, MAC_GROUP_SIZE)]
void main(uint3 tId : SV_DispatchThreadID)
{
uint width;
uint height;
uint depth;
MAC::TypeBuffer.GetDimensions(width, height, depth);
if (tId.x > width || tId.y > height || tId.z > depth)
return;
UpdateVelocity(tId, uint3(width, height, depth));
// Skip any that is outside. Sampling the temperature and concentration should return 0 in this case
if (tId.x == width || tId.y == height || tId.z == depth)
return;
ApplyExternalForces(tId, uint3(width, height, depth));
}Advection shaders
Finally, both velocity and temperature are advected. For both shaders, the value found by backtracking one timestep based on velocity is written in a temporary buffer which then gets copied over to the relevant buffer.
Ray marching
I won’t show the entire shader, since it is a pretty basic ray marching algorithm. General details can be found in the blog.
Each step of the marcher sampels the FluidBuffer for the density. Then, I offset the sampled position by the velocity multiplied by a noise animation timer. I use the same noise as used by
float3 vel = GetVelocity(gridPos, UVX, UVY, UVZ);
samplePos += vel * timer * 0.1;
// Code from VoxelCloudSampler.cg
// https://bit.ly/NubisVoxelCloudPack
float4 noise = NubisNoise.SampleLevel(NoiseSampler, samplePos * 0.1, 0.0);
float wispyNoise = lerp(noise.r, noise.g, dimensionalProfile);
float billowyTypeGradient = pow(dimensionalProfile, 0.25);
float billowyNoise = lerp(noise.b * 0.3, noise.a * 0.3, billowyTypeGradient);
float noiseComposite = lerp(wispyNoise, billowyNoise, sample);
float uprezzedDensity = ValueErosion(sample, noiseComposite);
float poweredDensity = Square(sample);
uprezzedDensity *= poweredDensity;
uprezzedDensity = pow(uprezzedDensity, lerp(0.3, 0.6, max(0.0001, poweredDensity)));
accumulatedDensity += uprezzedDensity * inStep;To make the smoke look like actual smoke, I apply a blue noise jitter to each step of the march
float stepJitter = BlueNoise.SampleLevel(NoiseSampler, float3((float2)tId / 64.0, i * 0.1), 0.0);
t += ((inside) ? inStep : outStep) * (0.5 + stepJitter * 0.5);Debug mode
I implemented a voxel-based debugging mode that allows me to see what all values are.
I implemented it through first culling all voxels that are not needed and storing the needed instances in an instance list and indirect draw args buffer.
RWStructuredBuffer<VoxelInstance> VisibleVoxels : register(u0);
RWByteAddressBuffer IndirectArgs : register(u1); // For DrawIndexedInstanced
// Increment instance count
uint index;
IndirectArgs.InterlockedAdd(4, 1, index);
// Add instance to the visible ones
VoxelInstance inst;
inst.padding = 0;
inst.loc = tId;
inst.color = color;
VisibleVoxels[index] = inst;Then I just render the voxels using indirect indexed draw
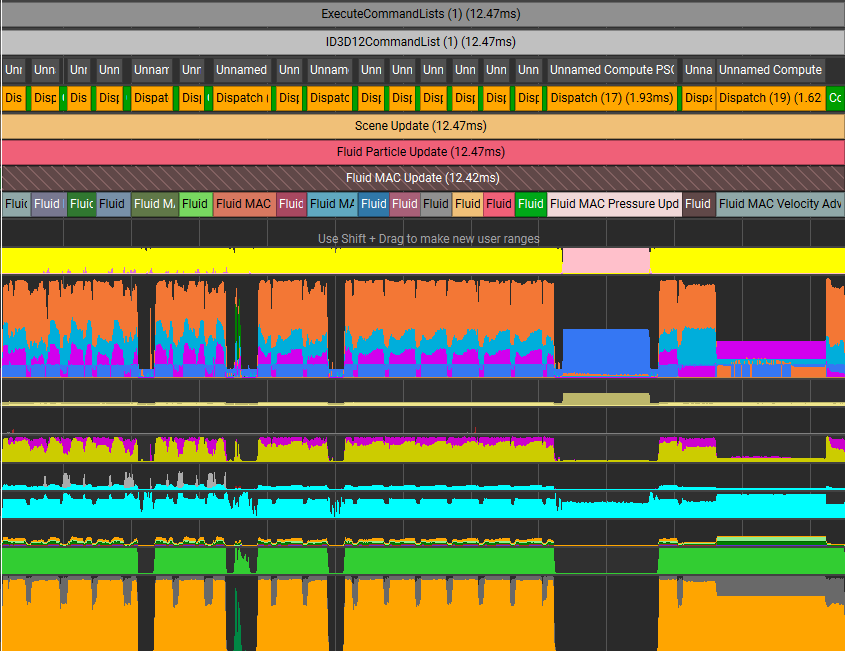
ctx.DrawIndirectIndexed(m_indirectDrawArgs);GPU Profiling
This block was the first time I properly profiled and optimised shaders. I used NVIDIA’s Nsight Graphics for tracing the GPU. For the MAC pipeline I went from this baseline
to this optimised version
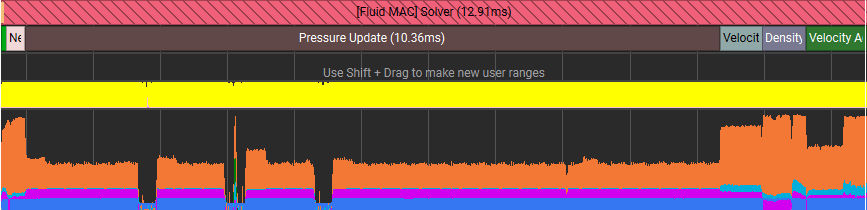
Please note that these are not at all good measures, since I added buoyancy and vorticity between these two captures.
The gain is not per se great. My shared memory approach did not work, since I eventually got some calculations to be unsynced and there is no way to sync all threads of a dispatch.